

Language Documentation
For microscheme version 0.9.2
This document is not intended to be a full Scheme tutorial. It is a specification of the subset of Scheme implemented by microscheme, and the particular workings of the runtime system. This document describes the built-in types and procedures of microscheme, and the mechanism by which runtime exceptions are reported.
Users who are new to Scheme might benefit from following a desktop tutorial such as Teach Yourself Scheme in Fixnum Days first, because programs running on a PC are much easier to debug than ones running on an Arduino.
Usage
microscheme [-aucvrio] [-m model] [-d device] [-w filename] [-t rounds] program[.ms]
Option flags:
-a Assemble (implied by -u) (requires -m)
-u Upload (requires -d)
-c Cleanup (removes intermediate files)
-v Verbose
-r Verify (Uploading takes longer)
-i Allow the same file to be included more than once
-o Disable optimizations
-h Show this help message
Configuration flags:
-m model Specify a model (UNO/MEGA/LEO...)
-d device Specify a physical device
-w files 'Link' with external C or assembly files
-t rounds Specify the maximum number of tree-shaker rounds
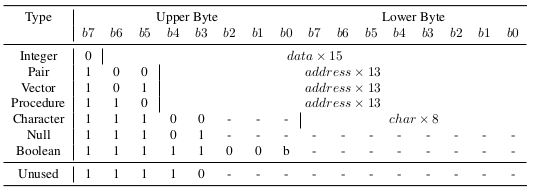
Type SystemTop
The basic built-in types are numbers, pairs, vectors, procedures, characters, Booleans and the empty list. Each of these has a corresponding type predicate:
Lists and Strings are built-in compound data types. This means that they are represented as combinations of the basic types.
Lists are represented as chains of pairs, terminating in the empty list. A list is any expression
Strings are represented as vectors of characters. A string is any expression
Fundamental FormsTop
A microscheme program is a sequence of top-level expressions. A top-level expression is a definition or any other expression. Definitions may not appear as subexpressions.
(define var val)
represents a top-level (i.e. global) binding of the name
(define (proc vars …) exprs …)
represents a procedure named
Expressions can take the following fundamental forms. (The keywords that identify fundamental forms are not first-class values. For example,
(lambda (vars …) exprs …)
represents a lambda abstraction, or an anonymous procedure with parameters
(let ((var val) …) exprs …) represents a lambda abstraction.
(if cond conseq else)
represents a control branch. If cond evaluates to
(set! var val) represents an assignment.
(begin exprs …) represents a sequence of expressions.
(and exprs …) evaluates expressions until one evaluates to false.
(or exprs …) evaluates expressions until one evaluates to true.
(free! exprs …) evaluates expressions, recovering heap memory afterwards. (Caution!)
(include “filename”)
is equivalent to the code contained in
(list exprs …)
represents a list whose elements are expressed by
(vector exprs …)
represents a vector whose elements are expressed by
(call-c-func “function” args …) invokes the Foreign Function Interface.
(procedure args …) represents a procedure application.
Primitive Procedures: Top
Primitive procedures are built-in to the language, and have efficient assembly-code implementations. The compiler performs function inlining on calls to these procedures, and they are available as first-class values at runtime.
(eq? x y) (= x y) (> x y) (>= x y) (< x y) (<= x y) (not x) (¬ x) (number? x) (pair? x) (vector? x) (procedure? x) (char? x) (boolean? x) (null? x) (assert x) (error) (stacksize) (heapsize) (pause x) (micropause x) (+ x y) (* x y) (- x y) (div x y) (mod x y) (zero? x) (cons x y) (car x) (cdr x) (set-car! x y) (set-cdr! x y) (vector-length x) (vector-ref x y) (vector-set! x y z) (make-vector x) (digital-state x y) (set-digital-state x y z) (register-state x) (set-register-state x y) (char->number x) (number->char x) (arity x) (apply proc lst) (<< x) (>> x) (| x y) (& x y) (~ x) (^ x y)
Library Procedures:Top
Library Procedures are written in microscheme, and are included automatically by the compiler. (There is no unnecessary memory penalty, because all unused definitions are eliminated by the tree-shaker.) Library Procedures are not inlined by the compiler, and do not have hand-optimized assembly implementations, but they generally represent much richer computations than primitives.
(equal? x y) (list? x) (string? x) (forever x) (for x y z) (for-both x y) (set-ddr x y) (set-pin x y) (output? x) (input? x) (high? x) (low? x) (output x) (input x) (high x) (low x) (toggle x) (serial-init) (serial-write x) (serial-read) (serial-available) (analog-init) (analog-read x) (analog-write x y) (reverse x) (length x) (member x lst) (for-each fnc lst) (fold x y z) (fold-right x y z) (map x y) (map-2 x y z) (zip x y) (all test lst) (for-each-vector x y) (for-each-vector-reverse x y) (all-vector x y) (vector-concat x y) (vector-copy x y) (vector-last x) (sub-vector x a b) (vector-first x y) (vector->list x) (list->vector x)
Memory ManagementTop
Since microscheme has no garbage collector, it is important to program in a memory-conservative style. The most significant part of that process is identifying memory-thirsty constructs, and keeping them out of any loops, so they will be evaluated as few times as possible.
The fundamental forms which allocate new heap space during their evaluation are
; Unlifted version
; (Heap space used every time (loop) is evaluated)
(define (loop)
(for 0 1
(lambda (i)
(print (vector-ref my-data i)))))
; Lifted version
; (No heap space used every time (loop) is evaluated)
(define (print-my-data i)
(print (vector-ref my-data i)))
(define (loop)
(for 0 1 print-my-data))
In the unlifted version of the above code, some heap space is used (allocated) every time
Another way of curtailing memory usage is the (free! exprs …) construct. Using
; free! version
; (No heap space used every time (loop) is evaluated)
(define (loop)
(free!
(for 0 1
(lambda (i)
(print (vector-ref my-data i))))))
Foreign Function InterfaceTop
Microscheme has a robust FFI (Foreign Function Interface) meaning that C code may be invoked directly from (ms) programs. The FFI is invoked using the special form: (call-c-func "function" args …). Functions with up to 10 arguments are supported.
Since Scheme is a dynamically typed language, whereas C is statically typed, typing interactions must be planned and annotated carefully. Generally, type conversion is achieved from the C side of the interface. Any C function invoked by the FFI should take arguments of type
One benefit of the FFI is that C libraries (such as the standard Math library) are effectively available within microscheme. The following example shows how a simple wrapper to the "power" function may be called via the FFI.
// ffitest.c
#include <math.h>
#include "microscheme_types.c"
ms_value mathpow(ms_value x, ms_value y) {
return round(pow(x, y));
}
;; ffitest.ms
;; Define a scheme wrapper around our external function...
(define (pow x y)
(call-c-func "mathpow" x y))
;; We call the external C function, and send the result via Serial
(serial-init 96)
(serial-write (pow 2 5))
The microscheme and C source files are combined during compilation at the 'linking' stage. The simplest way to achieve this is using the '-w filename' command line option when invoking microscheme. To compile the above example, one might run the command: $ microscheme -m UNO -w ffitest.c -a ffitest.ms.
Microscheme produces properly relocatable assembly files. Therefore, in a more complicated project, one may compile microscheme source files to assembly (by omitting the '-a' flag), then link and upload the program manually.
Interrupts are not used in the microscheme runtime system, but the FFI does enable or re-enable interrupts whenever C code is running. Therefore, C interrupt handlers will generally work, so long as control is periodically passed to some C function.
Runtime ExceptionsTop
Like Scheme, microscheme is strongly, dynamically typed. Exceptions are semantic errors that arise at runtime. Microscheme makes use of the Arduino's built-in LED on digital pin 13 to give on-device indications of these situations. Generally, exceptions are not recoverable, and the device will need to be reset if an exception is raised. While it is possible to use digital pin 13 for general input and output, it is highly recommended to leave it free for exception indication.
| Status | Meaning | Indication |
|---|---|---|
| RUN | Program Running | No Light |
| NVP | Not a Valued Procedure | Single Flashes |
| NAR | Number of ARguments | 2 Flashes |
| NAN | Not A Number | 3 Flashes |
| NAP | Not A Pair | 4 Flashes |
| NAV | Not A Vector | 5 Flashes |
| OOB | Out Of Bounds | 6 Flashes |
| DBZ | Divide By Zero | 7 Flashes |
| ERR | Custom Exception | Continuous Flashes |
| HALT | Program Completed | Continuous Light |
NVP: A procedure application takes the form (proc X1 X2 ... Xn) where proc is an expression. At the time of application, if proc does not evaluate to a (valued) procedure, such as the result of a (lambda …) form, or a variable bound to a procedure, then NVP will be raised.
NAR: A procedure application takes the form (proc X1 X2 ... Xn) where X1 X2 ... Xn are arguments. At the time of application, if proc evaluates to a procedure taking m arguments, but m ≠ n, then NAR will be raised.
NAN: Indicates that an arithmetic operator (+, -, *, /, div, mod) received an argument that did not evaluate to a number.
NAP: Indicates that a pair operator (car, cdr, set-car!, set-cdr!) received an argument that did not evaluate to a pair.
NAV: Indicates that a vector operator (vector-ref, vector-set!) received an argument that did not evaluate to a vector.
OOB: Indicates that a vector operator (vector-ref, vector-set!) received an index that was outside the dimensions of the vector given.
DBZ: Indicates an attempt to divide by zero.
ERR: This exception is raised manually by the programmer. See (error) and (assert expr) in the language guide.